

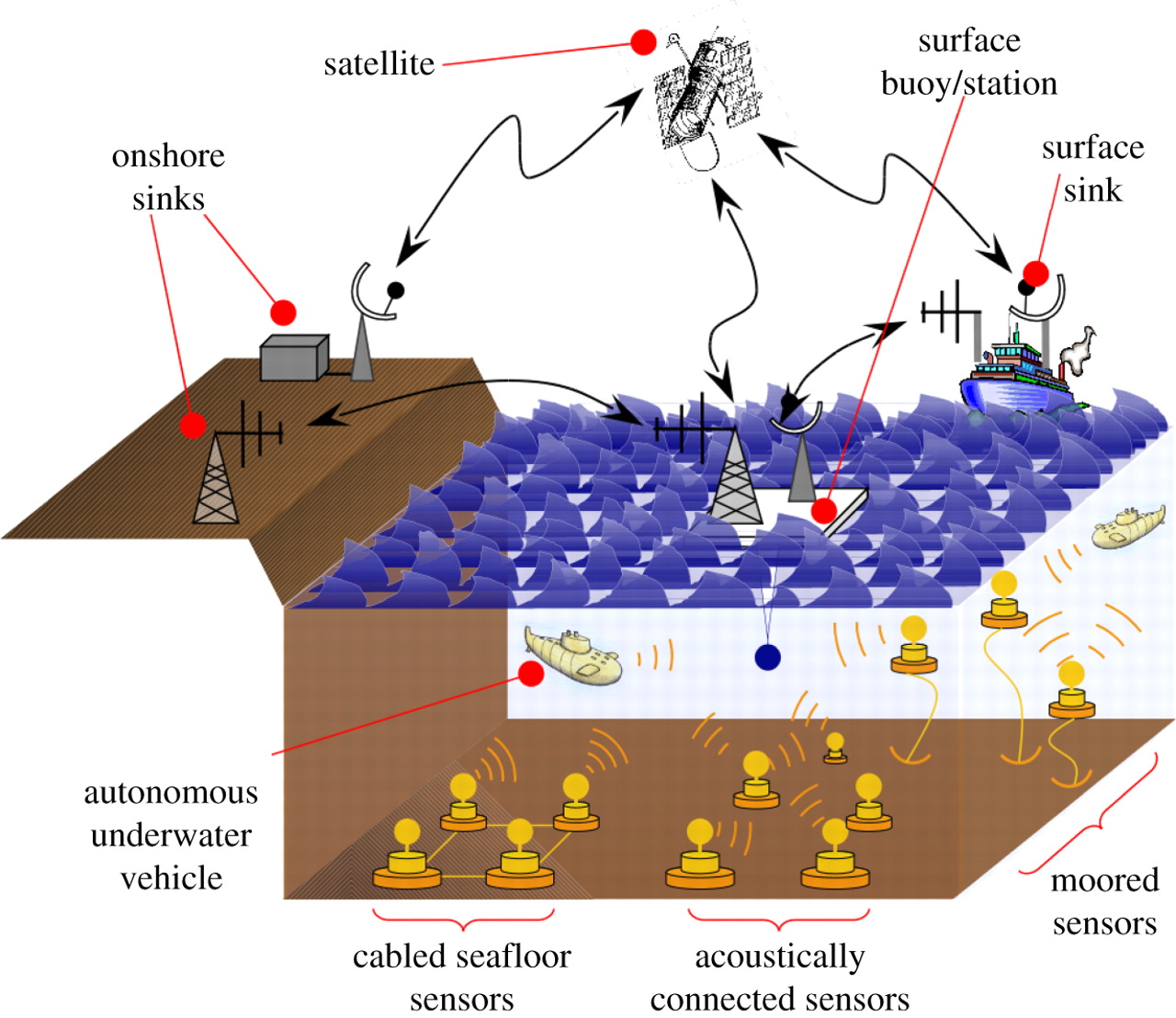
Despite having a similar functionality with terrestrial networks, Underwater Wireless Sensor Networks (UWSNs) exhibit several architectural differences which are mainly due to the transmission medium characteristics and the acoustic signals to transmit data. Routing in UWSNs is very challenging due to specific characteristics that distinguish UWSNs from other wireless networks such as wireless ad hoc networks or cellular networks.
Many new algorithms have been proposed, taking into consideration the inherent features of UWSNs along with the application and architecture requirements. Based on the network structure adopted, routing protocols for UWSNs that can be classified into flat network routing, hierarchical network routing, location-based network routing. Clustering protocols can reduce signaling overhead since they don’t have to manage the mobility pattern or information of locations of sensor nodes. Hence, the nodes saving more energy lead to a longer network lifetime. Clustering network is an efficient and scalable way to organize UWSNs.
Wireless sensor networks have been applied in many fields in recent years because the sensor nodes can be deployed without any infrastructure and the network can monitor many dangerous or remote places that people cannot reach. At the same time, many of the latest researches related to UWSNs mainly focused on routing, coverage, and localization.
UWSNs are characterized by low-cost micro sensor nodes with wireless capability, low power consumption for transmitting data, resource constraints, and battery energy limitation. Since sensor nodes have limited energy, it is urgent to introduce the energy-saving techniques in order to extend the lifetime of UWSNs.
Sensor Network Design
The design of the sensor networks is influenced by many factors, like fault tolerance, scalability, production costs, operating environment, sensor network topology, hardware constraints, transmission media, and power consumption. The protocol developers need to maintain a balance between the sensor network application needs and hardware limitations (power efficiency, scalability, and robustness). Currently, there are many WSN protocols with each one having its own set of features and a proper methodology for their evaluation against a given set of application.
Characteristics of UWSN
Underwater sensor networks are similar to their ground-based counterparts in many ways such as their structure, function, computation and energy limitations. However, they also have differences, like radio waves, don’t propagate properly underwater due to the high energy absorption of water.
Acoustic channels have low bandwidth. The link quality in underwater communication is badly affected by multipath, fading, and the refractive properties of the sound channel. As a result, the bit rates of error of acoustic links are often high, and losses of connectivity arise. Underwater sensors move with water currents, and AUVs are mobile in nature. Some nodes in underwater applications are anchored to the bottom of the ocean, other applications require sensors to be suspended at certain depths or to move freely in the underwater medium.
The future development of geographical routing is very promising in UWCNs due to scalability and limited signaling properties. However, it cannot rely on the Global Positioning System (GPS) because it uses radar waves in the 1.5 GHz band that do not propagate in water. As underwater hardware is more expensive, underwater sensors are sparsely deployed.
Communication Systems
Underwater communication systems need more stringent power requirements than terrestrial systems because acoustic communications are more power-hungry, and typical transmission distances in UWCNs are greater; hence, higher transmit power is required to ensure coverage. High bit error rates cause packet errors. Consequently, critical security packets can be lost. Wireless underwater channels can eavesdrop.
Attackers may intercept the information transmitted and attempt to modify drop packets. Malicious nodes create out-of-band connections via fast radio (above the water surface) and wired links, which are referred to as wormholes. Since sensors are mobile, relative distances vary with time. The power consumption in underwater communications is higher than in terrestrial radio communications and underwater sensors are sparsely deployed, energy exhaustion attacks to drain the batteries of nodes pose a serious threat for the network lifetime.
Applications
Environmental monitoring:UWSNs can perform pollution inspections such as chemical, biological, and nuclear. It’s possible to use it to provide the detail of the chemical slurry of antibiotics, estrogen-type hormones, and insecticides. It can also be used for the monitoring of ocean currents, winds, improved weather forecast, detecting climate change, biological monitoring such as tracking fishes and micro-organisms.
Disaster preventions: UWSNs can measure seismic activity along the sea floor from remote locations and predict an approaching tsunami. This monitoring allows coastal areas to be notified and warned in time to prevent any disaster.
Assisted navigation: Sensors can be used to identify dangers on the seabed, locate hazardous rocks in the deep water and submerged wrecks (Destroyed parts of the ship due to the accident).
Under sea explorations:Under water sensor networks are used for detecting underwater oil fields, deciding route for laying underwater sea cables, predict natural disturbances in the ocean, and help in search of natural minerals.
Mine reconnaissance:The simultaneous operation of multiple underwater acoustic vehicles with acoustic and optical sensors can be used to perform speedy environment assessment and detect items like mine.
Ocean sampling networks: Network of sensors and underwater vehicles can be used to perform synoptic, cooperative, an adaptive sampling of the coastal ocean environment.
Also read about:
Artificial intelligence A threat to humanity
6 Best Off The Beaten Path Treks in Nepal
How To Foolproof Your Social Media Marketing Strategy






